
空圧回路を制するものは自動機械を制す 第二回 電磁弁とシリンダー ~応用~
【1】はじめに
前回の記事ではエアシリンダと電磁弁の基礎的な解説を行いました。今回はその応用編として、空圧回路による制御、つまり電気を使わない制御について解説していきます。その内容は2つです。
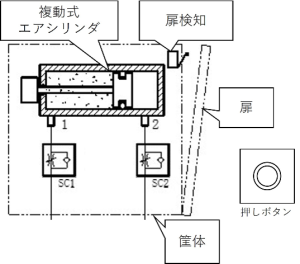
図1 エアシリンダ構成
・図1に示すように筐体の中にあるエアシリンダ。押しボタンを押すことでエアシリンダは動作する。このエアシリンダ、筐体の扉が開いているときには押しボタンを押しても動かないようにするにはどうすればよいか。
・エアシリンダ動作途中で速度を変更させるためにはどうすればよいか。
下記の順で解説していきます。
・空圧回路でエアシリンダを動かす
・インターロックを取ろう
・変速シリンダ
本題に入っていく前に、電気制御を使用する場合の構成を確認しておきます。
図1に示すような構成で、初期状態としてシリンダロッドは引き込まれています。押しボタン(以下PB:Push Button)を押すとロッドが押し出されます。単純にこの動作だけをみていきます。
いま、エアシリンダは筐体に覆われていて筐体には扉があり、リミットスイッチ(以下LS)で扉の開閉を検知します。扉が開いているときには押しボタンを押してもエアシリンダが動かないようにします。いわゆるインターロックです。
電気制御で動かすために図2のような構成をとります。
エア供給源(コンプレッサ)から送られてくる圧縮空気が3点セット(*1)を通り電磁弁に供給されています。電磁弁は電気信号を受けて弁体を開閉します。電磁弁への信号は制御機器(PLC:Programmable Logic Controller)から送られてきます。
PLCではPBおよびLSからの入力信号を受けて内部のラダープログラムに沿って処理を行い、信号を出力します。電磁弁はこの信号を受けて開閉を切り替えます。
(PBとLSの信号をandで出力するようにすればインターロックが取れる。)
これによりシリンダへの圧縮空気の供給/排気が切り替わり、シリンダが動作します。
ただしこれではエアシリンダの動作はできてもその途中で速度を変更することはできません。そのためには空圧回路による制御が必要になります。本記事の後半で解説します。
(*1)3点セット:フィルター/レギュレータ/ルブリケータのこと。ルブリケータは配管2次側に油を散布するもの。これにより、空圧機器の摺動性を良くする。最近の空圧機器はオイルフリーのものも多く、ルブリケータは使われないケースも多い。
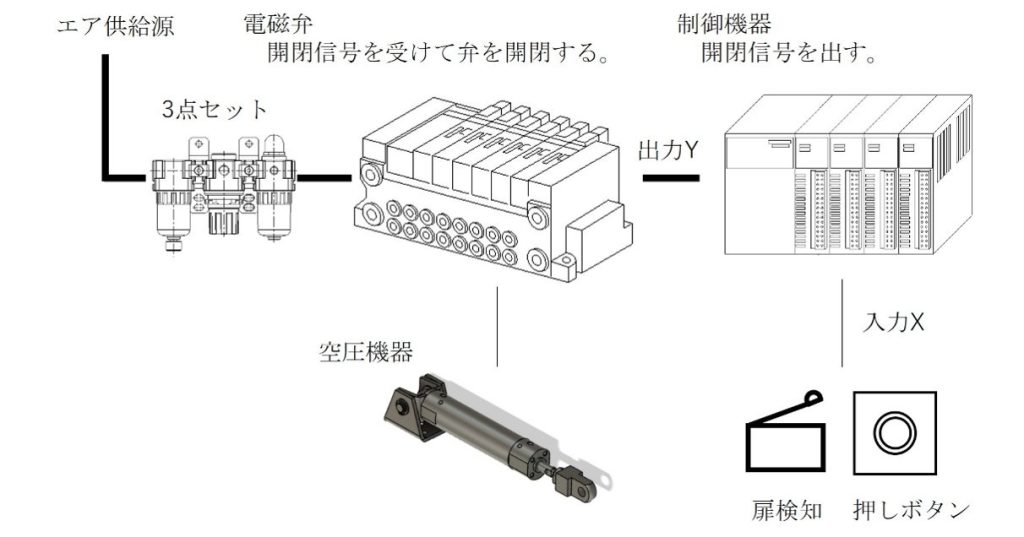
図2 電気制御の構成
電磁弁は図3に示すようなパイロット式という、電磁弁とエアオペ弁(圧縮空気を入力信号として動作する弁)を組合わせたものがあります。
電気信号で電磁弁を開閉し、エアオペ弁に送る圧縮空気の制御をします。
これを参考に、電磁弁ではなく機械的に弁を開閉するものを使用知れば電気の力を使わずに流体を制御することができます。
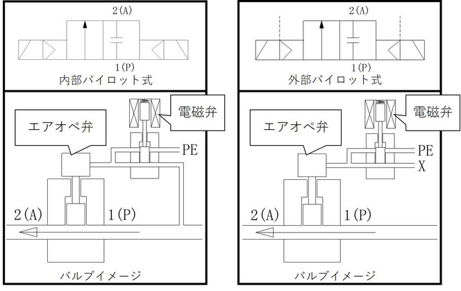
図3 パイロット式電磁弁
【2】空圧回路
(1)エアシリンダを動かそう
メカニカルバルブ(MV)を使用します。MVには押しボタン式(PB)やセレクタスイッチ(SSW)、ローラプランジャ型(RP)などがあります。
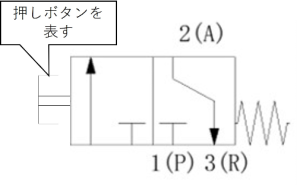
図4 3ポートPB
3ポートPBを図4に示します。
PBを押していない間は右側の状態になります。
すなわち、1番ポート(圧縮空気IN)は閉じており、2番ポート(アクチュエータ側)は3番ポート(排気、大気開放)と繋がっています。
いわゆるエアが抜けている状態になります。
PBを押すと左側の状態、すなわち1番と2番が繋がってアクチュエータに圧縮空気が送られます。
これを使って5ポートのエアオペ弁を開閉させることでエアシリンダを動作させます。
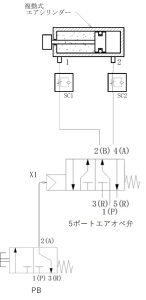
図5 空圧回路の構成
図5に示す空圧回路のようにPBからの圧縮空気を5ポートエアオペ弁に入力信号として供給します。
まず、PBを押していないときは前述の通りエアが抜けている状態になります。
このときエアオペ弁は右側の状態。すなわち圧縮空気が2番に供給されて、4番は排気(大気開放)と繋がります。
このときエアシリンダのロッドは引き込まれた状態になっています。
PBを押すことで左側の状態になり、エアオペ弁に圧縮空気が供給されます。
エアオペ弁は左側の状態になり、2番が排気、4番が圧縮空気の供給と切り替わります。
このときエアシリンダは押し出された状態になります。
PBを使った場合、ボタンから手を離したらロッドは引き込まれます。押している間だけ押し出されます。
動作中であれボタンから手を離したらロッドは引き込まれます。
PBの代わりにセレクタスイッチ(SSW)を使用するとスイッチの切り替えで引き込み、押し出しを固定することができます。
(2)インターロックをとろう
ここから、インターロックを取る方法を見ていきます。前述のPBを押している間だけシリンダを押し出す動作で説明します。
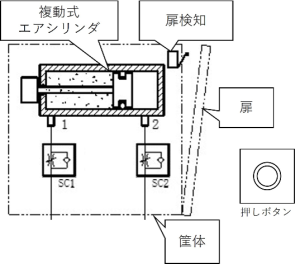
図6 エアシリンダ構成
図6に図1で見たエアシリンダの構成を再掲します。
扉検知にローラプランジャ型のメカニカルバルブ(RP)を使用します。
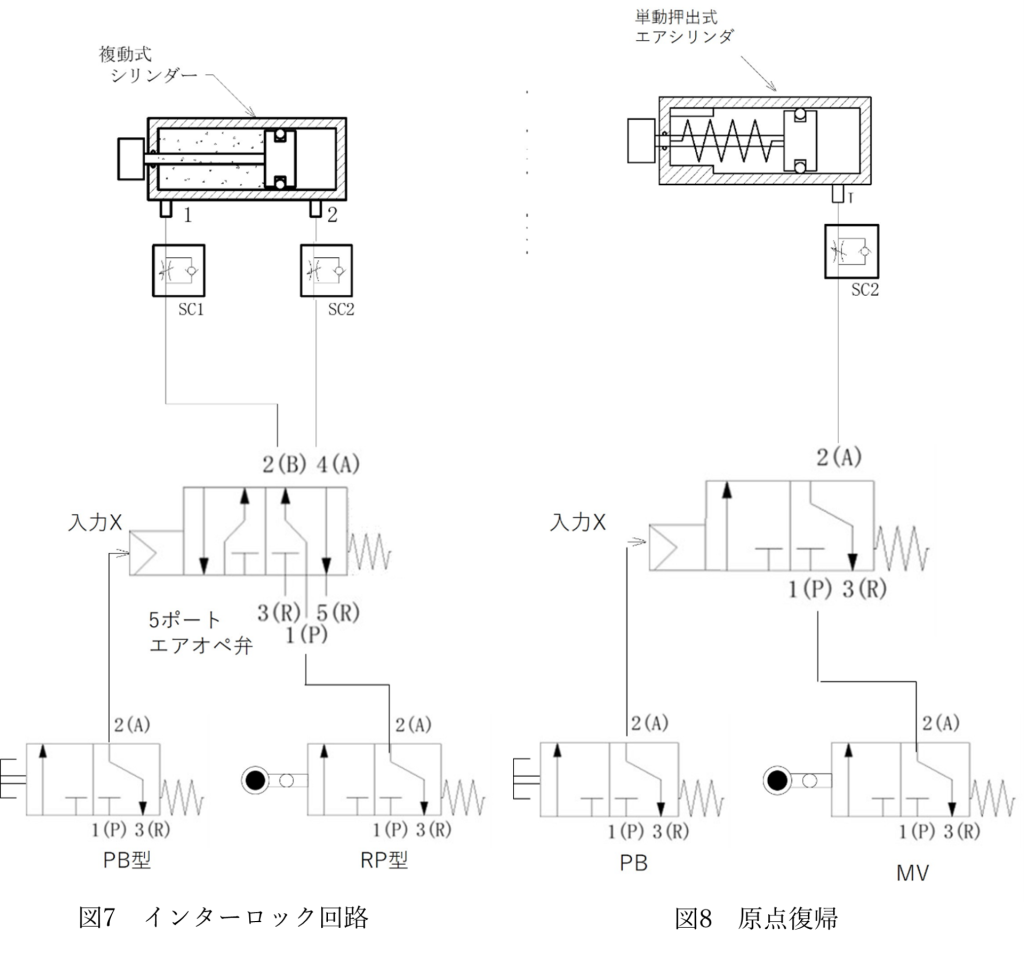
図7に空圧回路の例を示します。扉検知に使用するRPは2位置の3ポートタイプを使用します。ローラーがフリーのときは2番と3番が繋がり圧縮空気が抜けている状態になります。
このときにはPBを押したとしても、エアオペ弁に圧縮空気が供給されないためエアシリンダは動作しません。
扉が閉まりローラーが押されてONになっているときは1番と2番が繋がりエアオペ弁に圧縮空気が供給されます。
この状態になってようやくPBを押すことでエアシリンダが動作することになります。
この構成の場合、扉が開いたときにはエアオペ弁への圧縮空気の供給が無くなるため、エアシリンダのロッドはフリーな状態になります。
もし仮に扉が開いたときにロッドを原点に戻す動きをさせたい場合は図8に示すように単動式のエアシリンダを使用すると可能です。
(3)変速シリンダ
図9にストローク途中で変速する回路を示します。SC1、SC2はそれぞれメータアウト型のスピコンです。つまり排気量を絞って速度を調整するものになります。
SC1を絞れば押出側の速度が、SC2を絞れば引き込み側の速度がそれぞれ調整できます。
いま、ロッドストロークの途中にローラプランジャ型などのメカニカルバルブ(MV1)を配置し、ロッドを検知させます。
MV1からの圧縮空気を2ポートエアオペ弁に入力します。
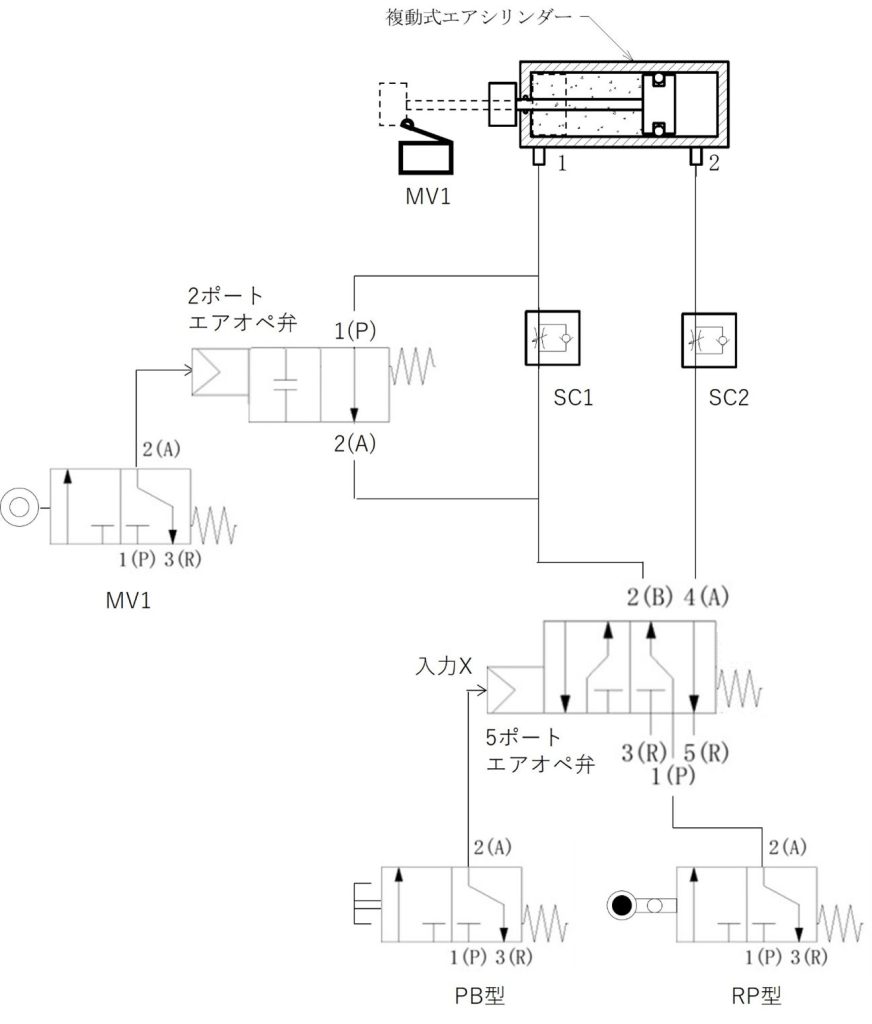
図9 変則回路
ロッドの押し出し始め、扉を閉めた状態でPBを押したところを考えます。図10にこのときの状態を示します。
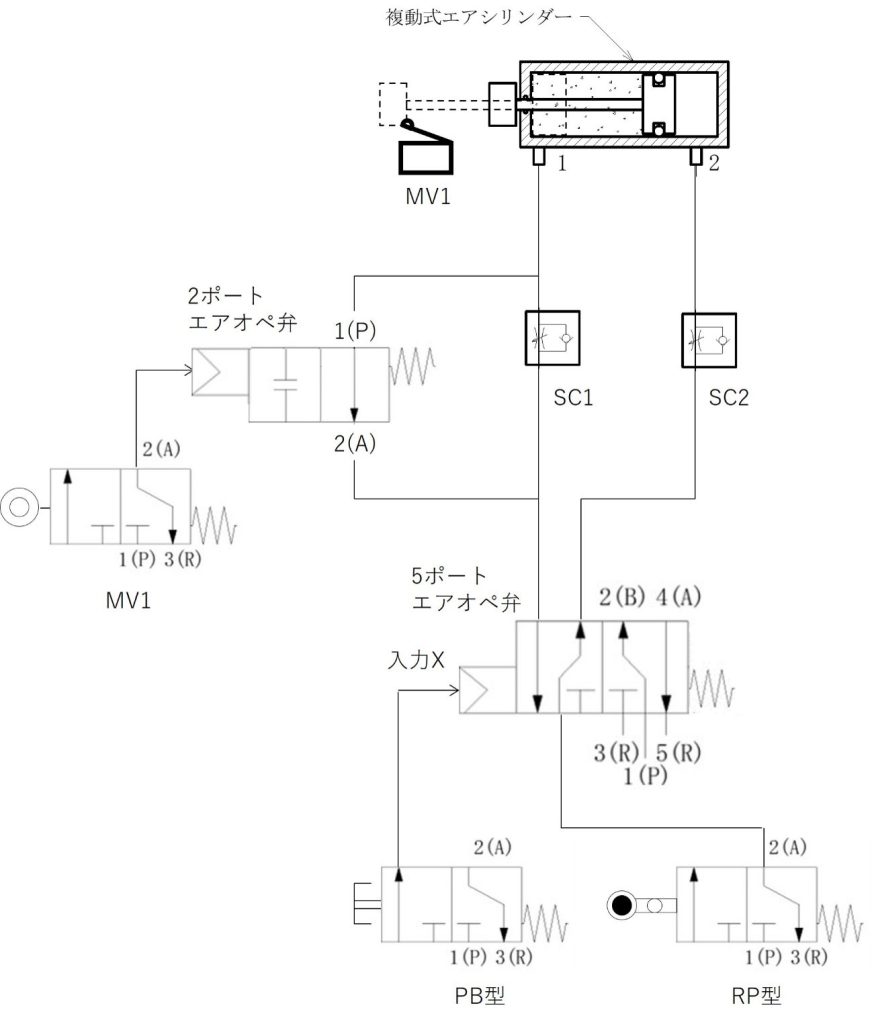
図10 押し出しはじめの状態
PBは左側の状態で1番と2番が繋がり、5ポートエアオペ弁に圧縮空気が供給されます。
5ポートエアオペ弁には左側の状態になり、エアシリンダは押し出し動作が始まります。
ここでMV1は2番と3番が繋がりエアが抜けている状態です。このとき2ポートエアオペ弁は1番と2番が繋がっています。すなわちエアシリンダ内部の圧縮空気はその1番ポートからSC1、およびそれと並列に配置された2ポートエアオペ弁を通って排気されます。
つまりSC1を絞ってもエアオペ弁側を通って排気されるため全開状態となります。
ロッドが動いてある位置まできたらMV1を押し込みます。このときMV1が左側の状態になり、1番と2番が繋がります。2ポートエアオペ弁に圧縮空気が供給されて左側の状態になり、圧縮空気の流路が閉ざされます。
これによりエアシリンダからの排気はSC1側のみを通ることになり、あらかじめSC1を調整していた速度でロッドが動くことになります。
以上
|
本連載を担当させていただきます、春山周夏(はるやましゅうか) |
 |